
監診實績

應用領域

常見問題
曝光機 Mask Aligner 如何確認穩定度?
監診實績|曝光機 Mask Aligner 如何確認穩定度?#半導體領域
#機器學習
半導體在製程中,製作電路時利用光波於晶圓上進行曝光,製程若出現異常抖動容易產生不良品,該如何執行檢測預防?
曝光機 Mask Aligner
是製造微機電、光電、二極體大規模積體電路的關鍵裝置。可以分為兩種,分別是模板與圖樣大小一致的contact aligner,曝光時模板緊貼晶圓;以及利用短波長雷射和類似投影機原理的步進式曝光機(英語:stepper)或掃描式曝光機(英語:scanner),獲得比模板更小的曝光圖樣。

曝光機作動原理
生產積體電路的簡要步驟:利用模版去除晶圓表面的保護膜。將晶圓浸泡在腐化劑中,失去保護膜的部分被腐蝕掉後形成電路。用純水洗淨殘留在晶圓表面的雜質。其中曝光機就是利用紫外線波長的準分子雷射通過模版去除晶圓表面的保護膜的裝置。
一片晶圓可以製作數十個積體電路,根據模版曝光機分為兩種:模版和晶圓大小一樣,模版不動。模版和積體電路大小一樣,模版隨曝光機聚焦部分移動。其中模版隨曝光機移動的方式,模版相對曝光機中心位置不變,始終利用聚焦鏡頭中心部分能得到更高的精度。來源:維基百科
解決與監測說明
VMS-ML 機器學習智能監控系統
固德針對曝光機避震平台做各軸向的量測,可得知各軸向變化,並將振動訊息可視化是把量測到的數值直接轉換成可以直觀形象理解的圖形或圖像表示方式,搭配現場操作人員經驗進而發現製程隱含的訊息做為機台各軸向維修門檻設立或線上監控的依據。
利用 VMS-ML 機器學習智能監控系統學習正確動作行為作為規範,為各別動作進行監測與診斷,透過系統了解設備在哪一個動作出現異常或不穩定的狀態,提早進行預知保養,避免無預警異常的發生。
量測狀況
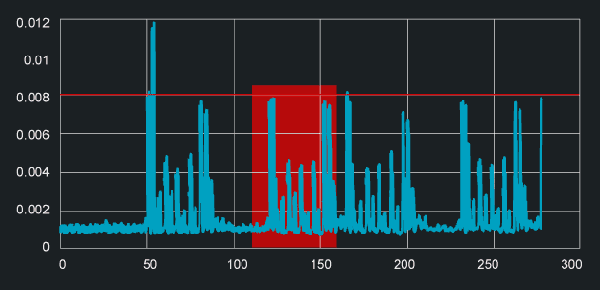
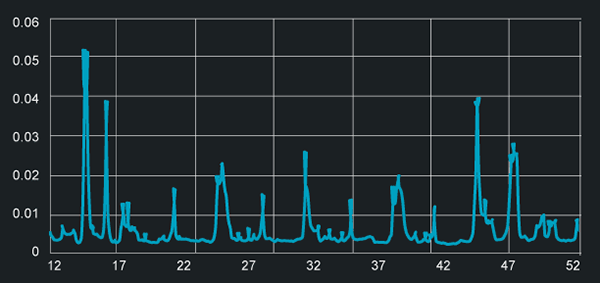
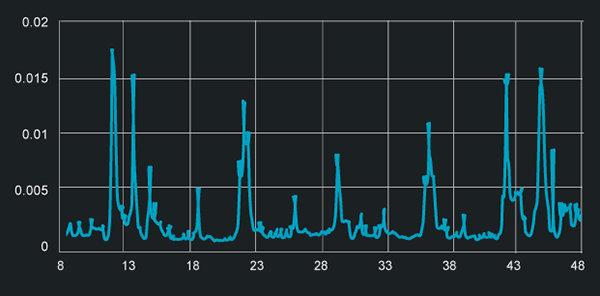
曝光機避震平台 X 軸動態訊號
A 設備 X 軸
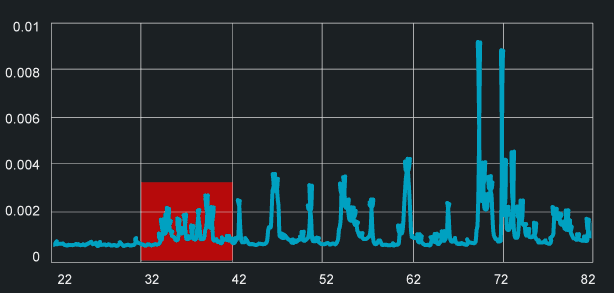
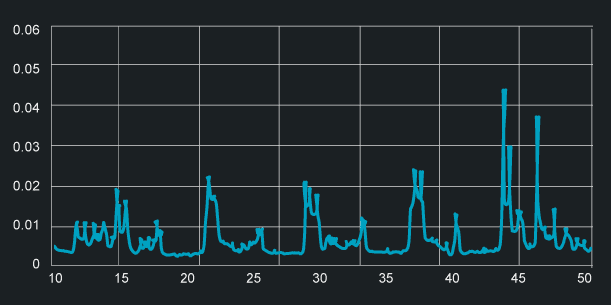
ZOOM IN:A 設備 X 軸
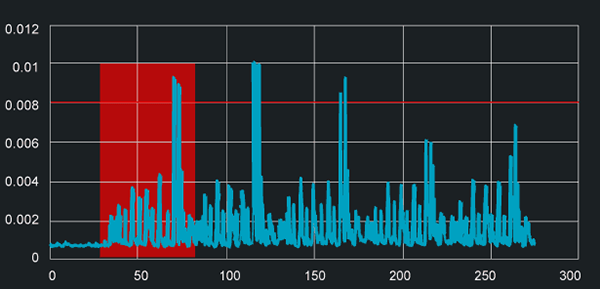
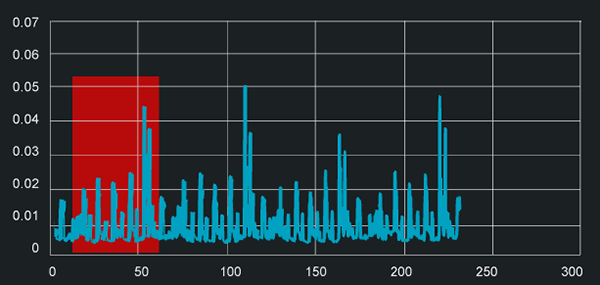
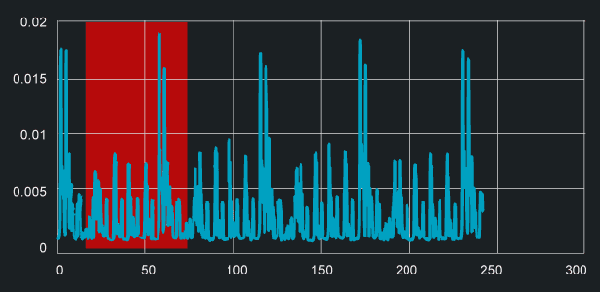
B 設備 X 軸
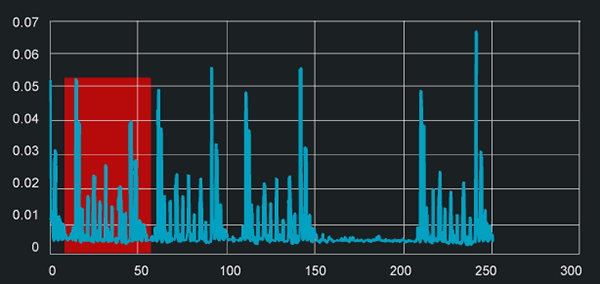
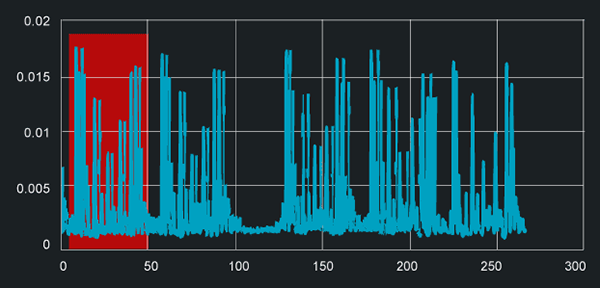
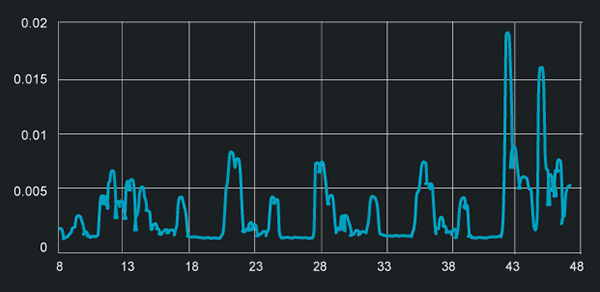
ZOOM IN:B 設備 X 軸
A 設備 X 軸(四次曝光流程)第一次移動會比 B 設備 X 軸較大
B 設備 X 軸在第四次移動時振動量大於 A 設備 X 軸
曝光機避震平台 Y 軸動態訊號
A 設備 Y 軸
ZOOM IN:A 設備 Y 軸
B 設備 Y 軸
ZOOM IN:B 設備 Y 軸
A 設備 Y 軸 (四次曝光流程) 第一次移動會比 B 設備 Y 軸較大
曝光機避震平台 Z 軸動態訊號
A 設備 Z 軸
ZOOM IN:A 設備 Z 軸
B 設備 Z 軸
ZOOM IN:B 設備 Z 軸
A 設備 Z 軸 (四次曝光流程) 第一次移動會比 B 設備 Z 軸較大
B 設備 Z 軸在四次移動時振動量皆大於 A 設備 Z 軸
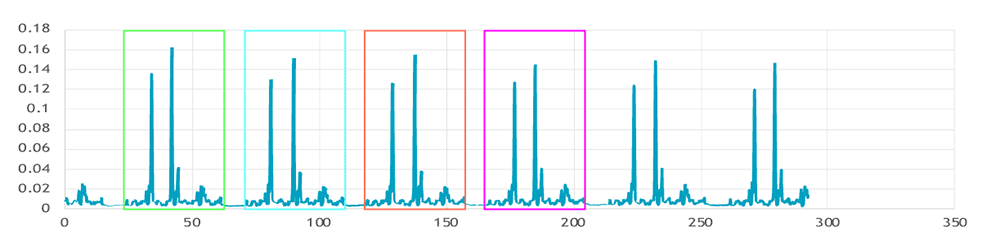
曝光機 Robot 動態訊號量測
A 設備 Robot
B 設備 Robot
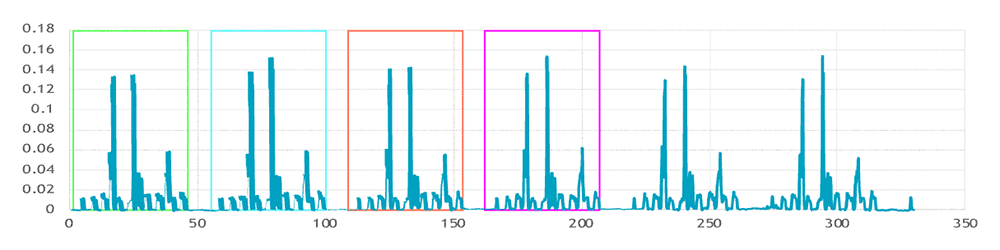
四個顏色表示Robot四次週期動作,多軸同動包含X軸、R軸、TH軸。
曝光機Robot動態訊號機械學習模擬管理
A 設備 Robot
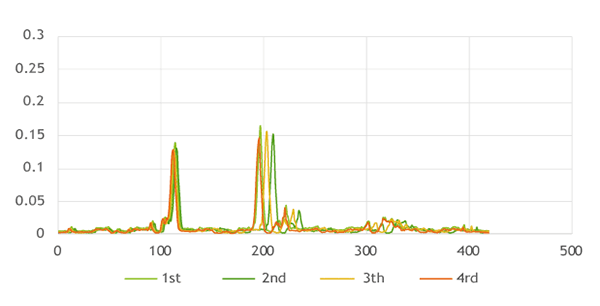
B 設備 Robot
測量結論
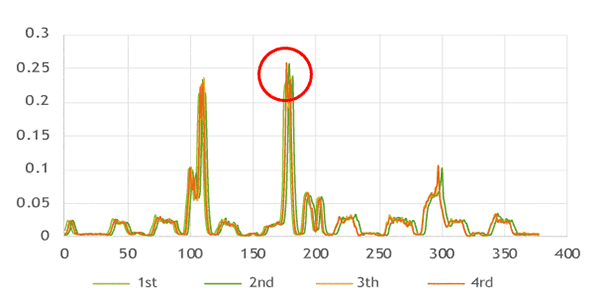
A 設備 Robot整體運行振動量小於 B 設備 Robot。由動態訊號可得知 B 設備 Robot 各軸向運行皆大於 A 設備, Robot B 設備 Robot運行速度高於 A 設備 Robot。A 設備 Robot 速度差異僅上下移動(Z軸)差異較大,其他軸向運行狀況良好。
VMS-ML 機器學習智能監控系統會對機台運行目標動作自動追蹤識別,機台因不穩定性、磨損、老化、損壞而由動態訊號相似度降底提早得知機台狀況微小變化,達到機台預知保養的目的。
VMS-PH 動態分析儀可針對機台軸向損壞對應Pattern差異可聚焦損壞部位以及提供精修軸位,並且可以對於損壞特徵訊號資料累積提供給VMS-ML作為機械學習的目標。

VMS-ML 機械學習智能監控系統
為各別動作進行監測與診斷
尋找半導體領域相關監測解決方案?
*索取簡介 掃描 QRcode 或輸入 LINE ID 搜尋:@grj4308r或來電 (03)356-1682
