
監診實績

應用領域

常見問題
PVD、CVD 機台手臂如何確認作動是否穩定?
監診實績|PVD、CVD 機台手臂如何確認作動是否穩定?#半導體領域
#機器學習
#PHM
#機械手臂
薄膜沉積的目的是在晶圓上增加導電特性,如何避免PVD、CVD機台手臂異常影響製程?如何確保作動穩定?
CVD PVD 機台手臂對於製程的重要性
掌握機台狀態,以確保高度的可靠性和穩定性
PVD及CVD機台通常包含多個部分,其中手臂是一個重要的組成部分。手臂主要用於將晶圓移動到不同的位置,以進行不同步驟的薄膜沉積。
當PVD機台的手臂發生異常時,可能會對製程產生多種影響,例如,製程可能需要停止或暫停,這會導致生產效率下降。停機時間越長,損失就越大。PVD機台的手臂在整個製程中負責將晶圓移動到不同的位置,以確保薄膜均勻沉積。手臂的異常可能導致製程不一致,使得每個晶圓的處理結果不同。此外,手臂的異常影響到製程的安全性,可能會對操作人員和設備造成潛在的安全風險。因此,使用者必須掌握機台狀態,以確保高度的可靠性和穩定性,以確保製程的順利運行。

VHP-PVD-NSK

VHP-Producer-NSK
監測說明
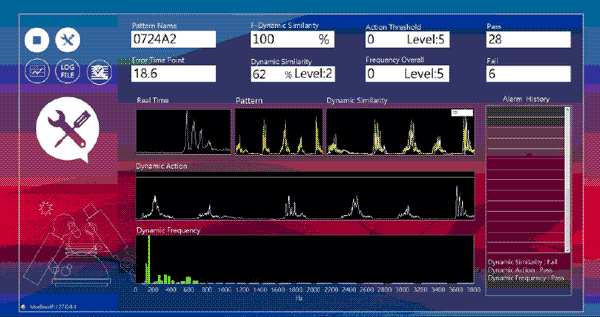
VMS-ML機器學習智能監控系統
VMS-ML能夠將CVD、PVD機台動態訊號與機械學習動作可視化,系統藉由學習機械動作並量測除了能夠得知機台作動中穩定性差異,利用數據趨勢可以說明機台的穩定度標準,還能夠作為維修後的效益確認出機前的驗證。
量測狀況
1. 安裝感測器:VMS-ML 外接sensor,不須與設備訊號對接!
立即開始為機台建立學習規範,進行機台狀況監測。
機台動態訊號與機械學習動作可視化說明:
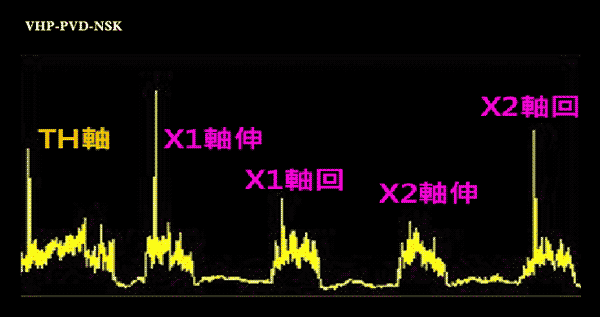
機型1:VHP-PVD-NSK
動作說明:TH軸旋轉後,X1前伸回至原位後換X2作動。
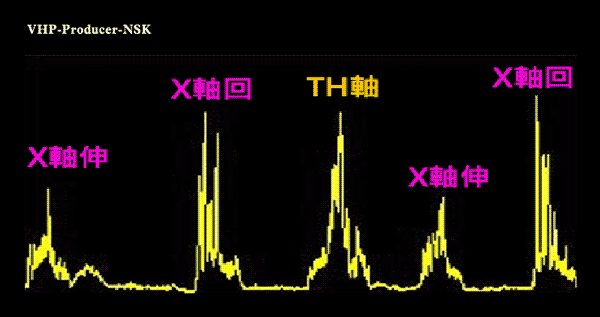
機型2:VHP-Producer-NSK
動作說明:X軸前伸回位後TH軸旋轉至對向X軸前伸後回至原位。
2.系統自動追蹤特徵訊號,在即時監測訊號中能夠自動偵測標定過的目標訊號
從單純到複雜的動作都可自動追蹤識別。
機台VHP-PVD-NSK異常模擬判別與可視化管理:

判定結果:X1軸與X2軸運行顫振。

判定結果:X2軸啟動收回突波異常。

判定結果:機台顫振。

判定結果:X2軸運行顫振。
機台VHP-Producer-NSK異常模擬判別與可視化管理:

判定結果:X軸前伸後收磨損。

判定結果:X軸前伸停止異常。

判定結果:機台顫振。
判定結果:TH軸啟動異常。
測量結論
藉由VMS-ML能夠為機台手臂作動流程中制定標準化,並抓出異常,避免因為手臂異常造成後續成品不良降低良率。將各式數據趨勢化後能夠掌握機台手臂狀態,預測設備發生異常的時間點。也可作為日後機台入廠維修前後的比對標準依據。
VMS-ML機器學習智能監控系統
尋找半導體製程相關監測解決方案?
*索取簡介 掃描 QRcode 或輸入 LINE ID 搜尋:@grj4308r或來電 (03)356-1682
