
監診實績

應用領域

常見問題
Stocker(STK)儲料設備該如何進行量測?
監診實績|Stocker(STK)儲料設備該如何進行量測?#半導體領域
#轉子馬達
#物聯網
#機器學習
#數位轉型
#機械手臂
工業4.0時代,許多自動化設備的運作藉以取代人力,加快了速度也簡化了繁重的工作及複雜的流程。Storker 儲料設備替代了重要傳輸製料工作,該如何進行量測確保運輸過程的穩定度?
Stocker 特點
工業4.0時代,許多自動化設備的運作藉以取代人力,加快了速度也簡化了繁重的工作及複雜的流程。隨著半導體與數位化科技的發展,為講求經濟效益,硅晶圓片也越做越大,因此在搬運的過程中,也就更加困難。
因此在廠區內架構了自動化運輸系統,如 AMHS(Automatic Material Handling System)自動化物料傳輸系統、OHT天車系統、Storker 儲料設備等就是為了替代這些重要的運輸工作,減輕了操作人員的負擔也避免人為的事故發生。Stocker 在各廠區依據使用性質有不同型態及運作方式。例如ZIP Stocker、Foup Stocker、Tower Stocker、Linear Stocker 等。主要特性大多都是採用模組化架構設計方式,都是要節省空間以及增加使用效率等。

解決與監測說明
VMS-ML 機器學習智能監控系統
Stocker 在面板廠負責玻璃基板原料、半導體廠內的製品或成品的儲存工作等,以下固德針對 Crane STK 搬運Casette動作行為與煞車伺服馬達的品質狀態進行監測診斷。利用 OLVMS-ML 機器學習智能監控系統學習正確動作行為作為規範,為各別動作進行監測與診斷,透過系統了解設備在哪一個動作出現異常或不穩定的狀態,提早進行預知保養,避免無預警異常的發生。
量測狀況
Crane STK 搬運 Casette 製程
學習 Crane STK 搬運 Casette 動作行為 時序連續動作說明:
Take:Crane 取 Cassette 動作
Put:Crane 放 Cassette 動作
Go:Crane 滑行至最內部
Come:Crane 滑回啟動位置
建立 Take、Put、Go、Come 管理 Pattern

Crane STK 搬運 Casette 製程動作辨認狀況
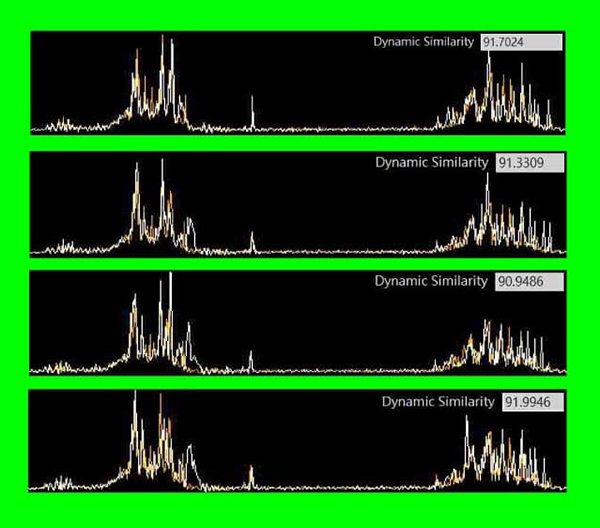
黃線:機械學習動作規範,白線:即時訊號
系統可自動追蹤手臂動作,同時管理取片、放片動作。無誤認情況
機台正常運行平均動態相似度: 放片-91% 取片-92%
手臂正常運作時,機械學習動作(黃線)與即時訊號(白線)貼合
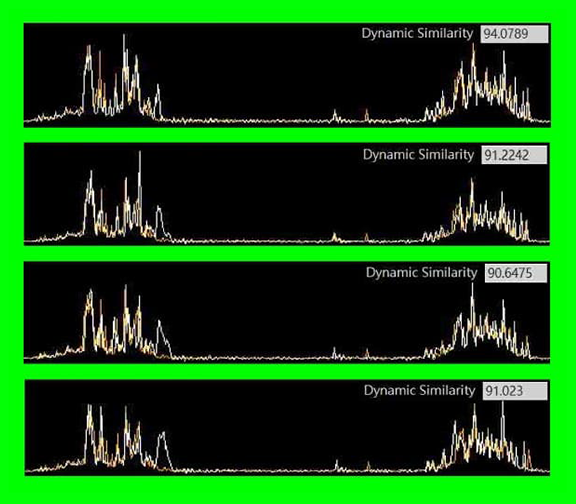
Crane STK 製程動作-空跑滑行狀況 (無 Casette )
黃線:機械學習動作規範,白線:即時訊號
Crane 空跑穩定動態相似度分數高 !
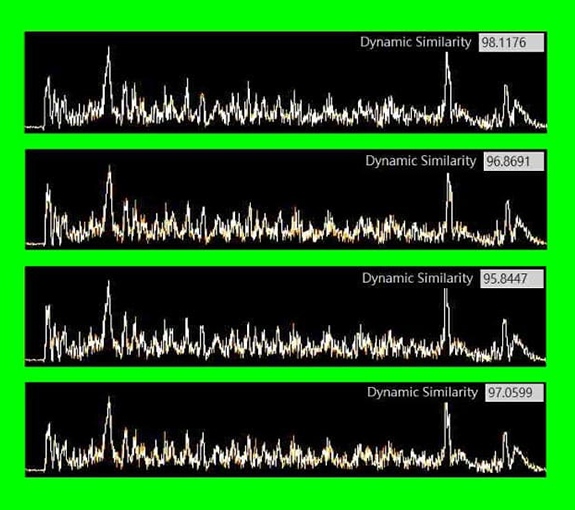
Crane STK 搬運 Casette 載重滑行與空跑比較
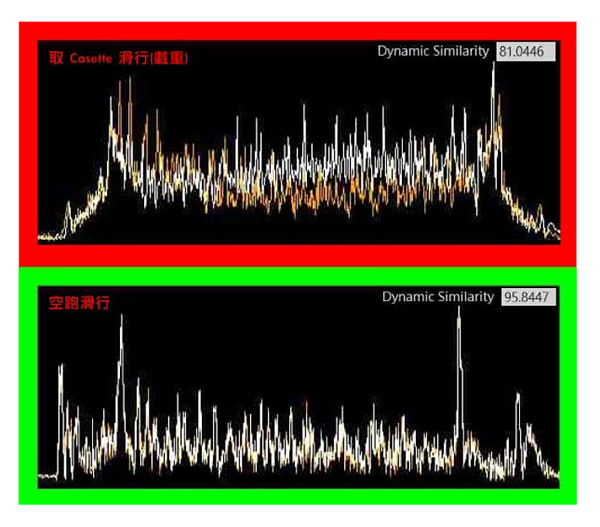
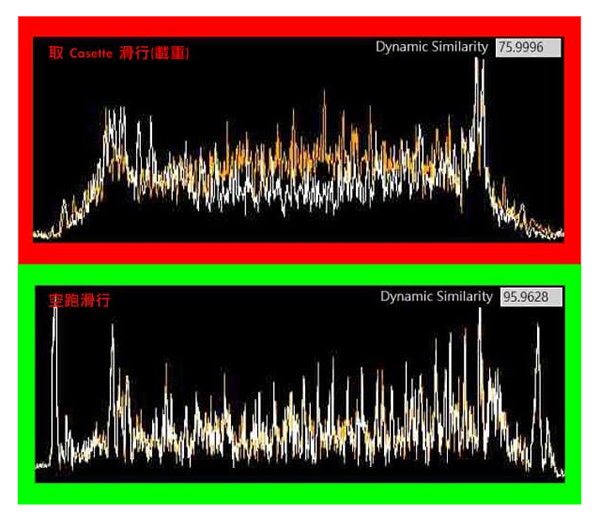
黃線:機械學習動作規範,白線:即時訊號
Crane載重後運行不一致導致動態相似度分數下降 !
手臂正常運作時,機械學習動作與即時訊號不一致 !
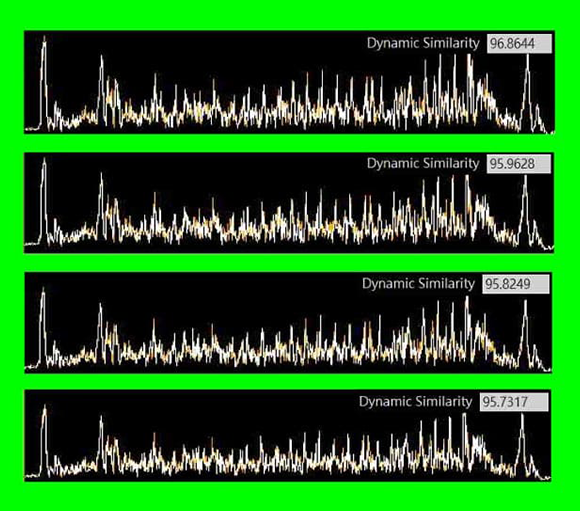
Crane 空跑四顆馬達時序狀況振動值比較
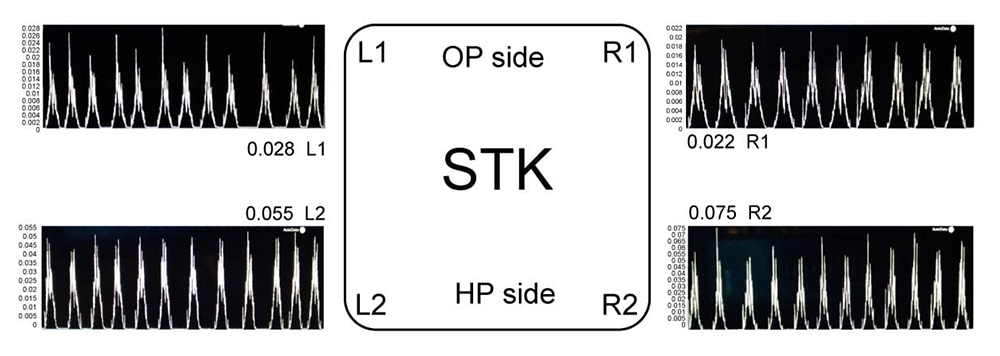
馬達運行可視化說明
Crane STK 負重馬達 L1、L2機械學習判別比較
Crane STK 負重馬達 L1
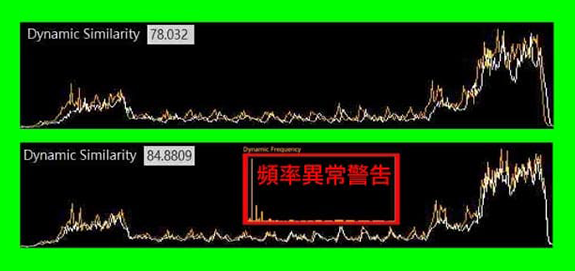
Crane STK 負重馬達 L2
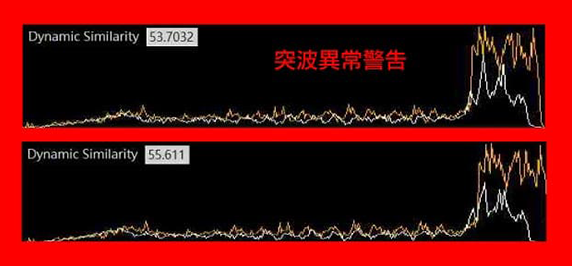
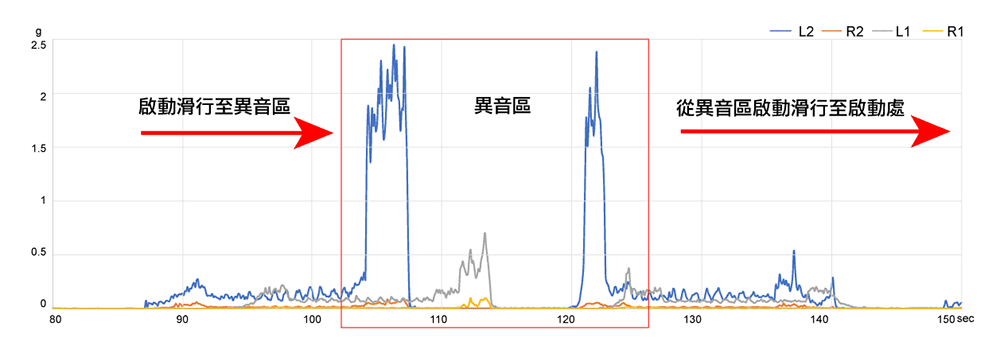
測量結論
使用廠內 OLVMS-ML 監測測試得知 STK L2會有突波異常情況與 (以健康馬達為Pattern) 相似度差異大而警告。L1 受 L2 影響相似度跳動、頻率相異常情況。R2 也受 L2 稍影響相似度稍微跳動 (跟R1比較)。僅離 L2 最遠的 R1 比較穩定。
VMS-ML 機械學習智能監控系統可用一顆Sensor 了解各軸向運行狀況後,再使用 VMS-PH 動態分析儀排查異常原因。
VMS-ML 機械學習智能監控系統
VMS-ML 機械學習智能監控系統
為各別動作進行監測與診斷
尋找機械手臂相關監測解決方案?
*索取簡介 掃描 QRcode 或輸入 LINE ID 搜尋:@grj4308r或來電 (03)356-1682
