
監診實績

應用領域

常見問題
如何預防手臂因為電流過大而造成的焊接不良?
監診實績|如何預防手臂因為電流過大而造成的焊接不良?#機器學習
#PHM
#機械手臂
#汽車製造
#加工製造
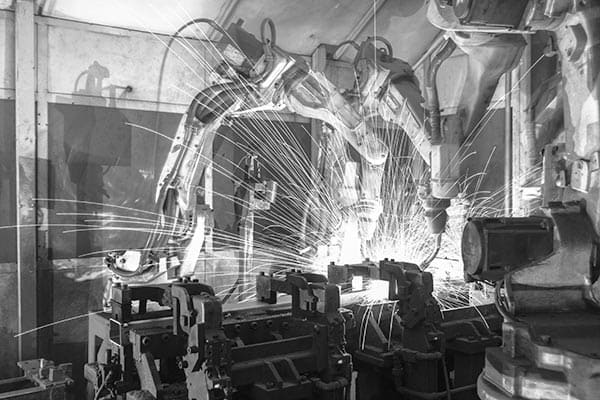
電焊手臂的作用原理是通過將高壓電流導入焊接部位,使其產生熱量將金屬材料熔合在一起以進行焊接。電焊手臂依靠電流導入焊接點,若是遇到電流過大或是位置不正確,就有可能導致焊接不良,該如何預防?
電焊手臂作動原理
電焊手臂的作用原理是通過將高壓電流導入焊接部位,使其產生熱量將金屬材料熔合在一起以進行焊接。此過程需要通過導電的焊接棒進行導電,並通過控制電流的強度和持續時間以調節熱量的生成。手臂的設計可以提供穩定的位置和手勢,以確保焊接的準確性和連續性。
自動化焊接手臂的作動是由用戶設定,將實務流程的步驟、位置、時間參數、運動參數、焊接參數等紀錄於程序中,手臂即可按照指示進行自動化操作。為了更適用於各式產品製造並且節省空間,焊接手臂擁有多軸向及關節以發揮最適合的動作範圍、應付各式複雜的環境。傳統焊接技術現在已能利用自動化焊接手臂做到,而且更穩定、快速。在智慧製造的工業 4.0 時代中,自動化焊接手臂已大量取代人類進行危險的焊接工作。隨著科技的進步,焊接手臂也在汽車、工程機械等領域都得到了廣泛的應用。在製造加工流程中,焊接品質該如何用科學化數據進行管理呢?
電焊手臂製程中常遇到的問題
在電焊手臂加工流程中,常遇到以下幾個問題:
焊接不良:如果焊接電流過大或過小,或者焊接位置不正確,就可能會導致焊接不良。
損壞的電焊手臂:由於電焊手臂在過程中需要承受高溫和大壓力,因此很容易造成損壞。
電源故障:如果電源故障,將會導致焊接過程中斷,需要重新進行調整。
控制系統故障:如果控制系統故障,可能會導致焊接過程不準確或不連續。
焊接棒磨損:在長時間的使用過程中,焊接棒可能會磨損,需要更換。
而這些問題可以藉由監測系統來提早預防發生,並藉由適當的維護和定期檢查以保持電焊手臂的正常運行。
解決與監測說明
VMS-ML 機器學習智能監控系統
利用VMS-ML機器學習智能監控系統,並安裝指標性電流特性的感測器,藉由軟體內的時域訊號、頻域訊號、快速傅立葉轉換、實時突波分析、及時對比技術,執行監測點焊加工行為正常與異常。達到實時監測、預知保養需求以維持產品良率與自動化稼動率。
量測狀況
感測器的選擇:
根據製程特性使用相對應的感測器,電焊手臂是運用電流導入焊接位置,因此使用電流感測器進行檢測。
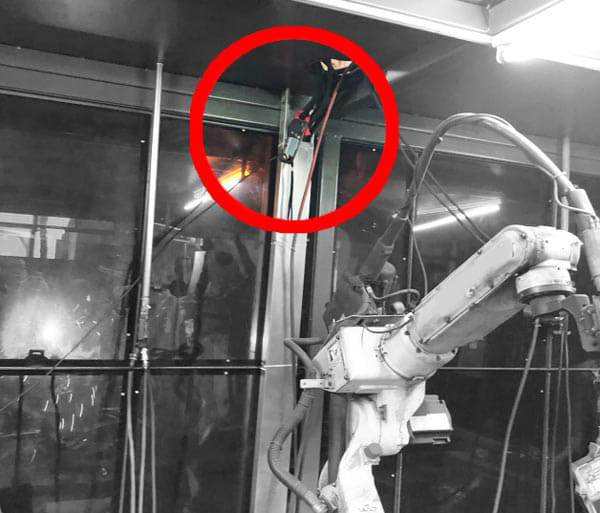
電流量測位置:
電流鉤錶外接於點焊電流直流電輸出電線上,直接獲取點焊電流訊號後開始監控管理。系統可學習指定點焊電流訊號(電流鉤錶接於正極)。
系統量測說明:
VMS-ML機器學習智能監控系統,採非侵入式量測,隨插即量。藉由學習正確訊號建立規範,並可自動判別訊號种類,自動擷取目標訊號。
電焊手臂量測結果
監測狀態:正常 Pass
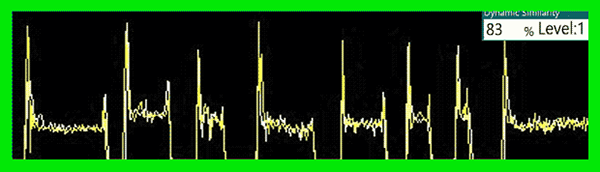
辨認電流製程訊號後加以監控其穩定性。
相似度分數:83%
監測狀態:異常警報 Fail
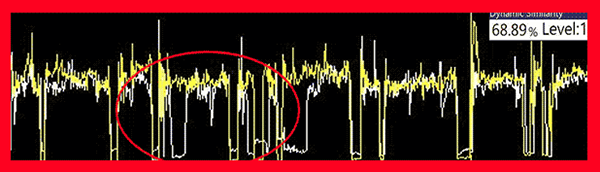
辨認異常電流製程訊號導致相似度降低。
相似度分數:69%
特徵與趨勢
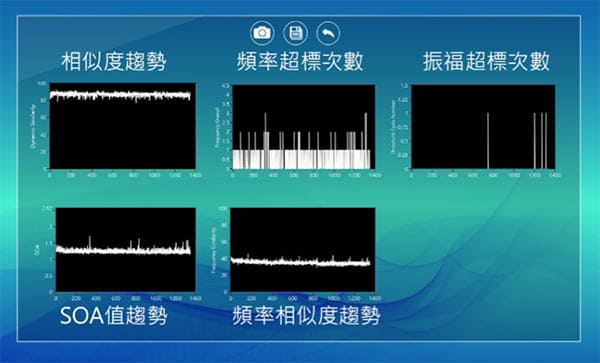
量測後特徵可作為未來智能製造AI管理。
測量結論
利用 VMS-ML 機器學習智能監控系統 學習正確動作行為作為規範,結合製程經驗建立製程電流門坎後即可開始比對監控管理。單次異常檢測可明顯判別出訊號不同、長時間管理可預知機台運行狀況掌握產品質量、相似度降低表示電流不穩定、產品異常發生。
VMS-ML 機器學習智能監控系統能為各別動作進行監測與診斷,透過系統了解設備在哪一個動作出現異常或不穩定的狀態,提早進行預知保養,避免無預警異常的發生。
VMS-ML 機器學習智能監控系統
VMS-ML 機器學習智能監控系統
掌握手臂電流狀態
尋找加工製造相關監測解決方案?
*索取簡介 掃描 QRcode 或輸入 LINE ID 搜尋:@grj4308r或來電 (03)356-1682
