
监诊实绩

应用领域

常见问题
曝光机 Mask Aligner 如何确认稳定度?
监诊实绩|曝光机 Mask Aligner 如何确认稳定度?半导体在制程中,制作电路时利用光波于晶圆上进行曝光,制程若出现异常抖动容易产生不良品,该如何执行检测预防?
曝光机 Mask Aligner
是制造微机电、光电、二极体大规模积体电路的关键装置。可以分为两种,分别是模板与图样大小一致的contact aligner,曝光时模板紧贴晶圆;以及利用短波长雷射和类似投影机原理的步进式曝光机(英语:stepper)或扫描式曝光机(英语:scanner),获得比模板更小的曝光图样。

曝光机作动原理
生产积体电路的简要步骤:利用模版去除晶圆表面的保护膜。将晶圆浸泡在腐化剂中,失去保护膜的部分被腐蚀掉后形成电路。用纯水洗净残留在晶圆表面的杂质。其中曝光机就是利用紫外线波长的准分子雷射通过模版去除晶圆表面的保护膜的装置。
一片晶圆可以制作数十个积体电路,根据模版曝光机分为两种:模版和晶圆大小一样,模版不动。模版和积体电路大小一样,模版随曝光机聚焦部分移动。其中模版随曝光机移动的方式,模版相对曝光机中心位置不变,始终利用聚焦镜头中心部分能得到更高的精度。 来源:维基百科
解决与监测说明
VMS-ML 机器学习智能监控系统
固德针对曝光机避震平台做各轴向的量测,可得知各轴向变化,并将振动讯息可视化是把量测到的数值直接转换成可以直观形象理解的图形或图像表示方式,搭配现场操作人员经验进而发现制程隐含的讯息做为机台各轴向维修门槛设立或线上监控的依据。
利用VMS-ML 机器学习智能监控系统学习正确动作行为作为规范,为各别动作进行监测与诊断,透过系统了解设备在哪一个动作出现异常或不稳定的状态,提早进行预知保养,避免无预警异常的发生。
量测状况
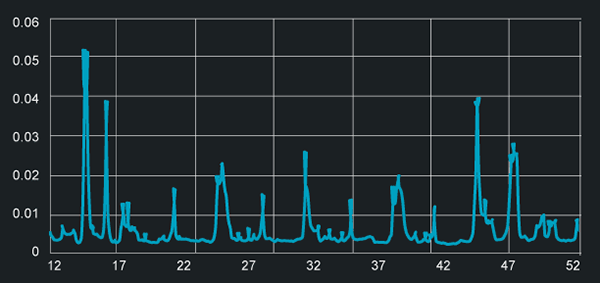
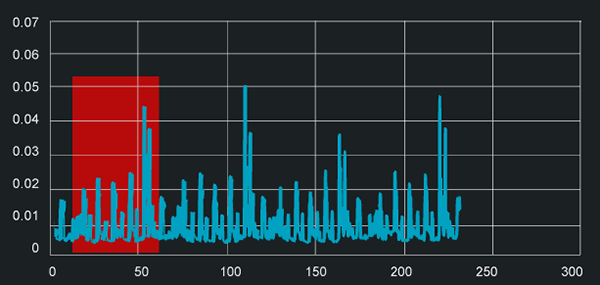
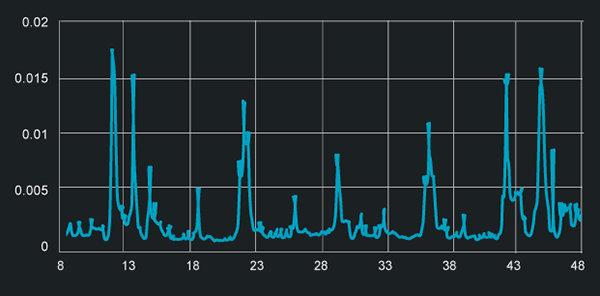
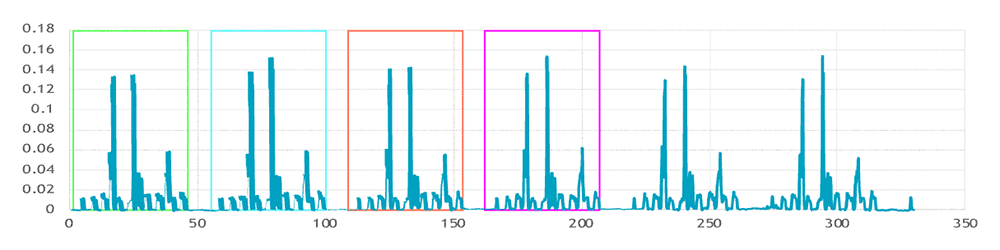
曝光机避震平台 X 轴动态讯号
A 设备 X 轴
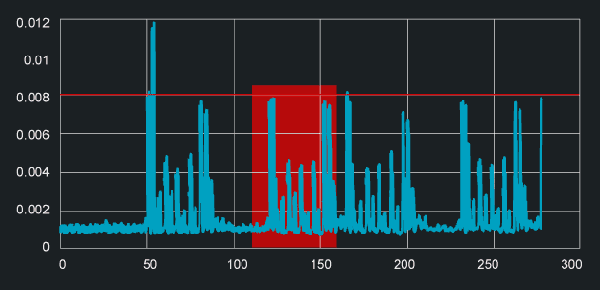
ZOOM IN:A 设备 X 轴
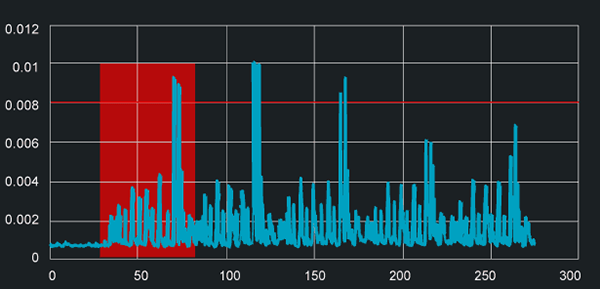
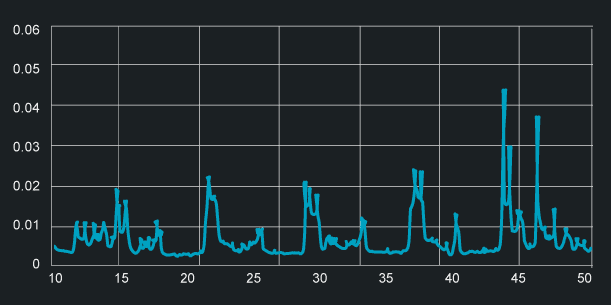
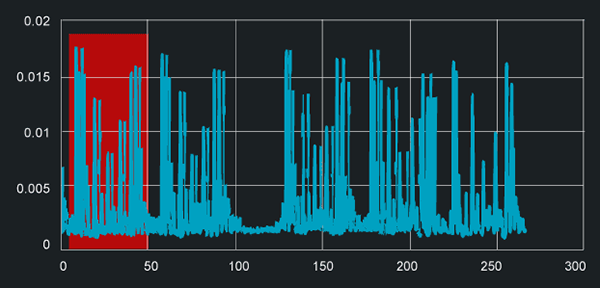
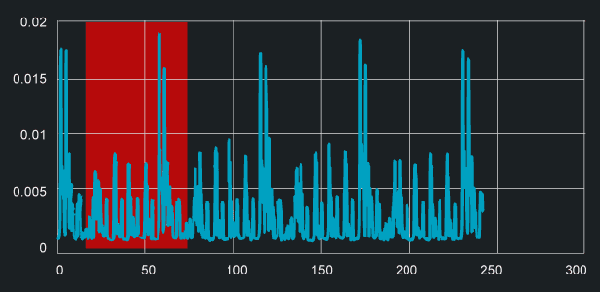
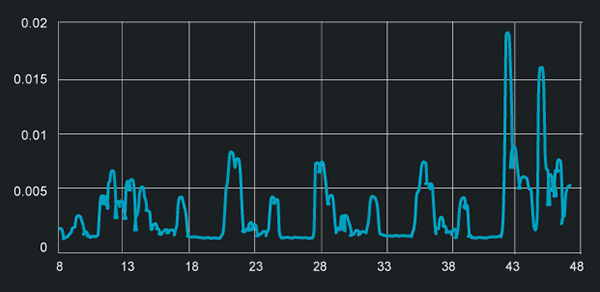
B 设备 X 轴
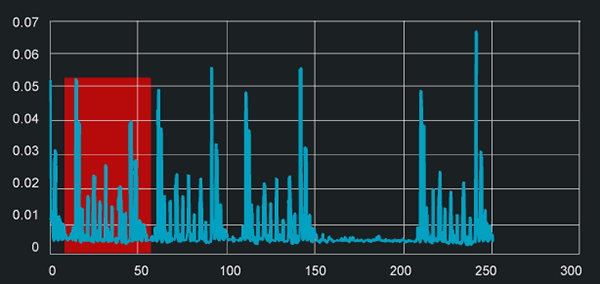
ZOOM IN:B 设备 X 轴
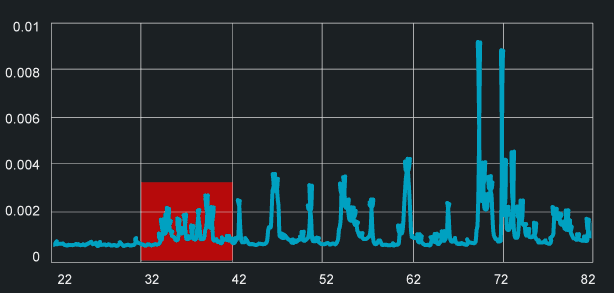
A 设备 X 轴(四次曝光流程)第一次移动会比 B 设备 X 轴较大
B 设备 X 轴在第四次移动时振动量大于 A 设备 X 轴
曝光机避震平台 Y 轴动态讯号
A 设备 Y 轴
ZOOM IN:A 设备 Y 轴
B 设备 Y 轴
ZOOM IN:B 设备 Y 轴
A 设备 Y 轴 (四次曝光流程) 第一次移动会比 B 设备 Y 轴较大
曝光机避震平台 Z 轴动态讯号
A 设备 Z 轴
ZOOM IN:A 设备 Z 轴
B 设备 Z 轴
ZOOM IN:B 设备 Z 轴
A 设备 Z 轴 (四次曝光流程) 第一次移动会比 B 设备 Z 轴较大
B 设备 Z 轴在四次移动时振动量皆大于 A 设备 Z 轴
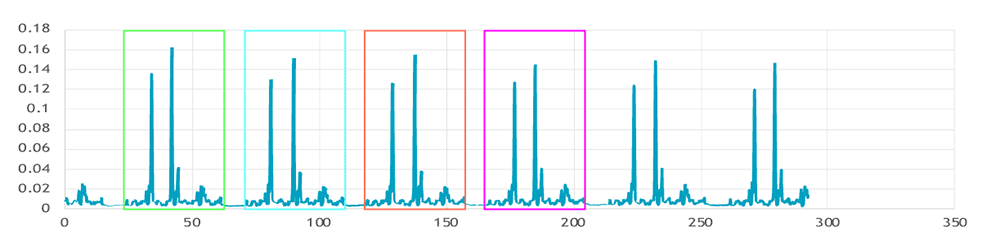
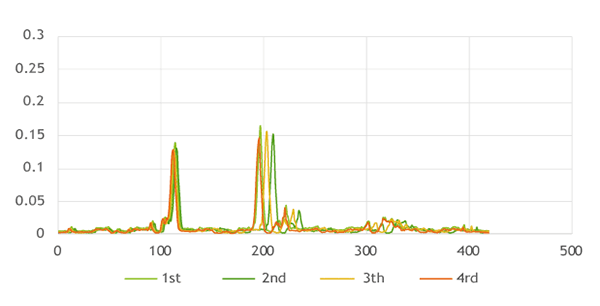
曝光机 Robot 动态讯号量测
A 设备 Robot
B 设备 Robot
四个颜色表示Robot四次周期动作,多轴同动包含X轴、R轴、TH轴。
曝光机Robot动态讯号机械学习模拟管理
A 设备 Robot
B 设备 Robot
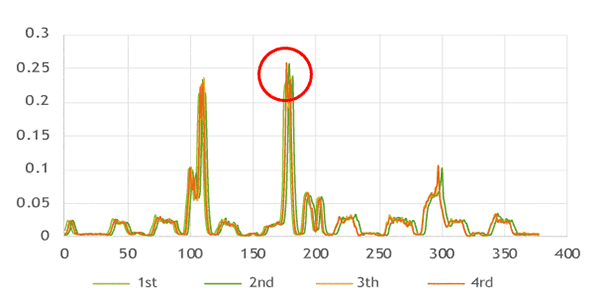
测量结论
A 设备 Robot整体运行振动量小于 B 设备 Robot。由动态讯号可得知 B 设备 Robot 各轴向运行皆大于 A 设备, Robot B 设备 Robot运行速度高于 A 设备 Robot。 A 设备 Robot 速度差异仅上下移动(Z轴)差异较大,其他轴向运行状况良好。
VMS-ML 机器学习智能监控系统会对机台运行目标动作自动追踪识别,机台因不稳定性、磨损、老化、损坏而由动态讯号相似度降底提早得知机台状况微小变化,达到机台预知保养的目的。
VMS-PH 动态分析仪可针对机台轴向损坏对应Pattern差异可聚焦损坏部位以及提供精修轴位,并且可以对于损坏特征讯号资料累积提供给VMS-ML作为机械学习的目标。

VMS-ML 机械学习智能监控系统
为各别动作进行监测与诊断