
监诊实绩

应用领域

常见问题
利用电流了解多轴手臂的作动状态品质?
监诊实绩|利用电流了解多轴手臂的作动状态品质?多轴机械手臂是一种多关节机械臂,需要产生更大的转动力矩时,则需要马达以较大的电流来实现。
多轴机械手臂
多轴机械手臂就像是工业界的舞者,可以在三维空间中灵活地舞动。它的每个关节都像是它的舞蹈步伐,由马达或伺服马达来推动,就像是舞者的肌肉一样。这些马达会跟着减速器一起工作,以提供更大的转矩和更精确的运动控制。透过控制这些马达的转动,可以实现机械手臂在各个关节上的运动。
多轴机械手臂的马达驱动与电流之间有密切的关系,主要是因为马达是透过电流来驱动的。当机械手臂进行运动时,每个关节的马达都需要消耗电能来产生转动力矩。因此,马达的电流会随着机械手臂的运动而变化。
具体而言,当机械手臂需要产生更大的转动力矩时,马达需要较大的电流来实现。这通常发生在机械手臂负载增加或需要克服阻力时,例如在举起重物或对抗外部阻力时。相反,当机械手臂处于较轻的负载或静止状态时,马达所需的电流较小。

背隙
背隙(backlash),背隙就像是机械系统中的一个小死区,就像是齿轮齿和齿之间的微小间隙。你可以把它想象成一种延迟现象,就像当你转动一个齿轮时,开始转动时可能会有一点延迟才会真正转动起来,这是因为背隙的存在。有时候,这种延迟是不希望的,尤其是在需要精准控制的应用中,但有时候,我们也希望有一些背隙,这样可以让机械元件在运转时更加灵活,避免卡死的情况发生。
背隙的存在有许多原因,比如为了让机械元件能够顺畅地润滑、因为机械公差、承受负载时的弹性、以及因为温度变化引起的热胀冷缩等。在机械系统中有时是必要的,有时是可以被接受的,而有时又是需要被尽可能地减少的。
监测说明
VMS-ML 机器学习智能监控系统
VMS-ML 机器学习智能监控系统能够学习正确的规范,再藉由规范来比对状态好坏,在本次量测中,我们在电控箱中利用CT监测电流来进行量测。由于多轴机械手臂的电流变化是由总轴数加总组成,讯号将会揉再一起。因此,若以电流监测方式,我们使用单轴或少轴组成动作作为此次监测标的,再藉由监测结果来判断手臂作动是否稳定。
量测状况
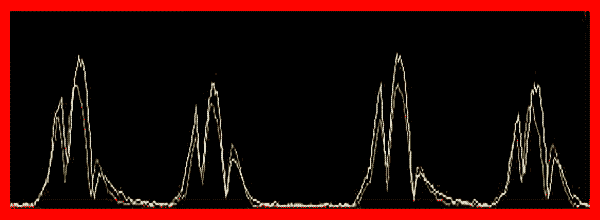
规范建立

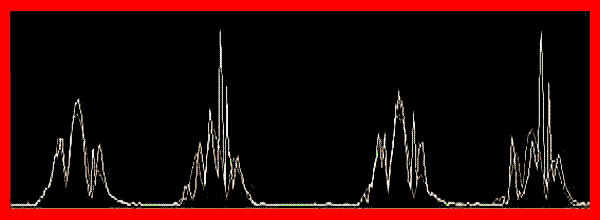
异音料件比对
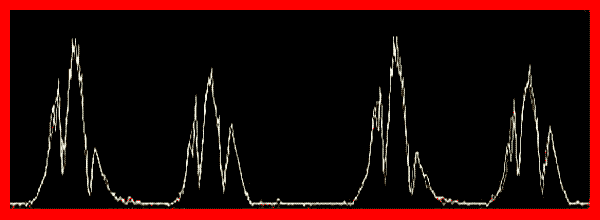
抖动料件比对
背隙料件比对
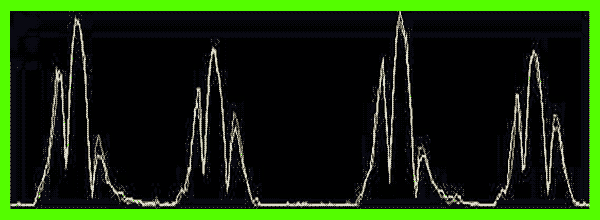
正常(些许异音)料件比对
测量结论
根据感测器反馈的信息,藉由系统讯号对比我们可以知道手臂电流状态将影响手臂作动品质。马达的电流稳定将实现精确的运动控制。这样可以确保机械手臂在不同工作条件下都能够稳定运行,同时最小化能量消耗和马达的磨损。
VMS-ML 机器学习智能监控系统
VMS-ML 机器学习智能监控系统
及时拦截不良品