
监诊实绩

应用领域

常见问题
如何预防手臂因为电流过大而造成的焊接不良?
监诊实绩|如何预防手臂因为电流过大而造成的焊接不良?电焊手臂的作用原理是通过将高压电流导入焊接部位,使其产生热量将金属材料熔合在一起以进行焊接。电焊手臂依靠电流导入焊接点,若是遇到电流过大或是位置不正确,就有可能导致焊接不良,该如何预防?
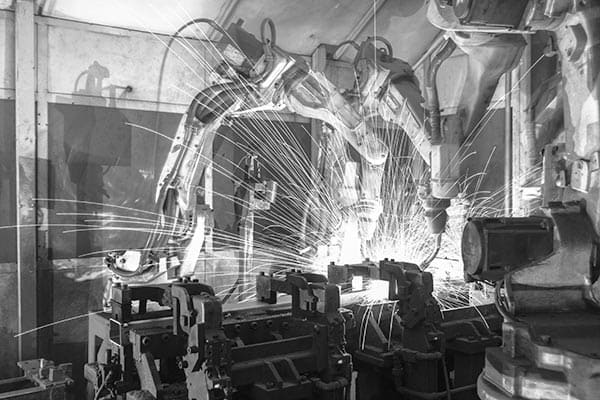
电焊手臂作动原理
电焊手臂的作用原理是通过将高压电流导入焊接部位,使其产生热量将金属材料熔合在一起以进行焊接。此过程需要通过导电的焊接棒进行导电,并通过控制电流的强度和持续时间以调节热量的生成。手臂的设计可以提供稳定的位置和手势,以确保焊接的准确性和连续性。
自动化焊接手臂的作动是由用户设定,将实务流程的步骤、位置、时间参数、运动参数、焊接参数等纪录于程序中,手臂即可按照指示进行自动化操作。为了更适用于各式产品製造并且节省空间,焊接手臂拥有多轴向及关节以发挥最适合的动作范围、应付各式複杂的环境。传统焊接技术现在已能利用自动化焊接手臂做到,而且更稳定、快速。在智慧製造的工业 4.0 时代中,自动化焊接手臂已大量取代人类进行危险的焊接工作。随着科技的进步,焊接手臂也在汽车、工程机械等领域都得到了广泛的应用。在製造加工流程中,焊接品质该如何用科学化数据进行管理呢?
电焊手臂製程中常遇到的问题
在电焊手臂加工流程中,常遇到以下几个问题:
焊接不良:如果焊接电流过大或过小,或者焊接位置不正确,就可能会导致焊接不良。
损坏的电焊手臂:由于电焊手臂在过程中需要承受高温和大压力,因此很容易造成损坏。
电源故障:如果电源故障,将会导致焊接过程中断,需要重新进行调整。
控制系统故障:如果控制系统故障,可能会导致焊接过程不准确或不连续。
焊接棒磨损:在长时间的使用过程中,焊接棒可能会磨损,需要更换。
而这些问题可以藉由监测系统来提早预防发生,并藉由适当的维护和定期检查以保持电焊手臂的正常运行。
解决与监测说明
VMS-ML 机器学习智能监控系统
利用VMS-ML机器学习智能监控系统,并安装指标性电流特性的感测器,藉由软体内的时域讯号、频域讯号、快速傅立叶转换、实时突波分析、及时对比技术,执行监测点焊加工行为正常与异常。达到实时监测、预知保养需求以维持产品良率与自动化稼动率。
量测状况
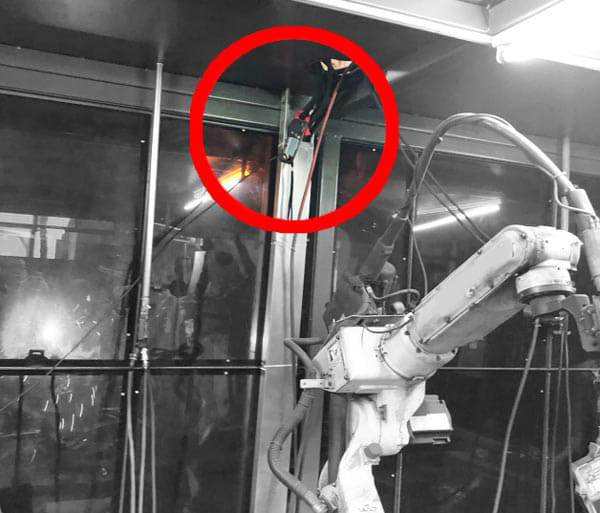
感测器的选择:
根据製程特性使用相对应的感测器,电焊手臂是运用电流导入焊接位置,因此使用电流感测器进行检测。
电流量测位置:
电流钩錶外接于点焊电流直流电输出电线上,直接获取点焊电流讯号后开始监控管理。系统可学习指定点焊电流讯号(电流钩錶接于正极)。
系统量测说明:
VMS-ML机器学习智能监控系统,採非侵入式量测,随插即量。藉由学习正确讯号建立规范,并可自动判别讯号种类,自动撷取目标讯号。
电焊手臂量测结果
监测状态:正常 Pass
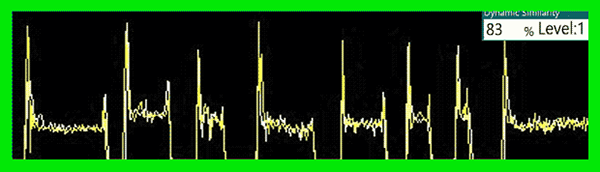
辨认电流製程讯号后加以监控其稳定性。
相似度分数:83%
监测状态:异常警报 Fail
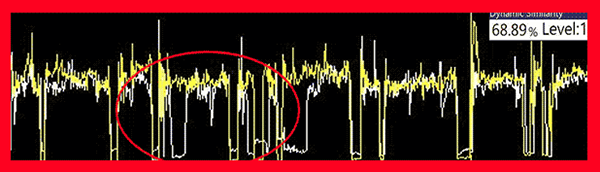
辨认异常电流製程讯号导致相似度降低。
相似度分数:69%
特徵与趋势
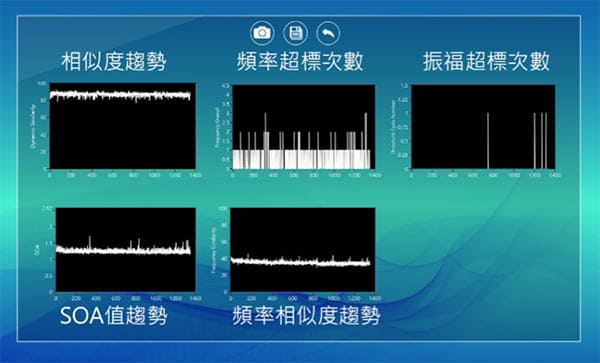
量测后特徵可作为未来智能製造AI管理。
测量结论
利用 VMS-ML 机器学习智能监控系统 学习正确动作行为作为规范,结合製程经验建立製程电流门坎后即可开始比对监控管理。单次异常检测可明显判别出讯号不同、长时间管理可预知机台运行状况掌握产品质量、相似度降低表示电流不稳定、产品异常发生。
VMS-ML 机器学习智能监控系统能为各别动作进行监测与诊断,透过系统了解设备在哪一个动作出现异常或不稳定的状态,提早进行预知保养,避免无预警异常的发生。
VMS-ML 机器学习智能监控系统
VMS-ML 机器学习智能监控系统
掌握手臂电流状态