
実績

応用分野

質問集
電流を活用して多軸ロボットアームの動作状態の品質を把握する?
実績|電流を活用して多軸ロボットアームの動作状態の品質を把握する?多軸ロボットアームは多関節機械アームであり、大きなトルクを発生させるためにはモーターがより大きな電流を必要とします。
多軸ロボットアームとは
多軸ロボットアームは、まるで工業界のダンサーのように、三次元空間で自由自在に動くことができます。
各関節はまるでダンスのステップのように動作し、モーターやサーボモーターが駆動源として機能します。
これらのモーターは減速機と連携して動作し、大きなトルクと高精度な動作制御を実現します。
モーターの回転を制御することで、ロボットアームの各関節の動きを制御することができます。
モーター駆動と電流の関係
多軸ロボットアームにおいて、モーターの駆動と電流は密接に関連しています。
ロボットアームの各関節のモーターは、電流を消費することでトルクを発生させ、関節を動作させます。
そのため、電流値はロボットアームの動作状態に応じて変化します。
例えば、ロボットアームが重い物を持ち上げたり、外部の抵抗に逆らって動作する場合、
より大きなトルクが必要となり、モーターの電流も増加します。
逆に、軽い負荷や静止状態では、消費電流は少なくなります。

バックラッシュとは?
バックラッシュ(backlash)は、機械システム内の小さな死角のようなもので、
歯車の歯と歯の間の微小な隙間に相当します。
例えば、歯車を回転させるとき、動き始める前に若干の遅れが発生することがあります。
これはバックラッシュによるもので、機械の摩擦を防ぎ、スムーズな動作を可能にする役割もあります。
バックラッシュが発生する要因
- 潤滑のためのクリアランス確保
- 機械部品の公差や加工精度
- 負荷による弾性変形
- 温度変化による膨張・収縮
ある場合には許容されることもありますが、高精度が求められる用途では最小限に抑える必要があります。
監視方法
VMS-ML 機械学習スマート監視システム
VMS-MLは、基準となる正常な動作パターンを学習し、それを基に機器の状態を評価します。
今回の測定では、制御盤内でCT(カレントトランス)を使用して電流を監視しました。
多軸ロボットアームの電流変動は、全軸の合計値として現れるため、
監視信号は個々の軸のデータが混ざり合ったものになります。
そのため、電流監視を行う際は、単軸または少数軸の動作を対象とし、
測定結果からロボットアームの動作の安定性を評価します。
測定状況
基準設定

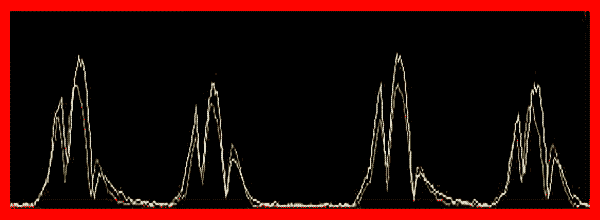
異音部品の比較
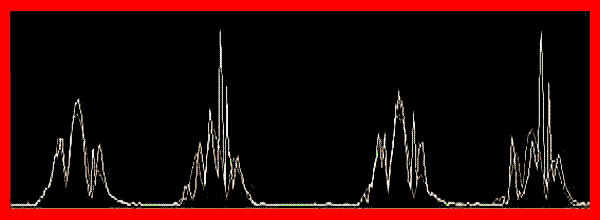
振動部品の比較
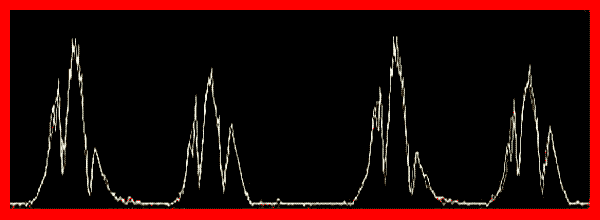
バックラッシュ部品の比較
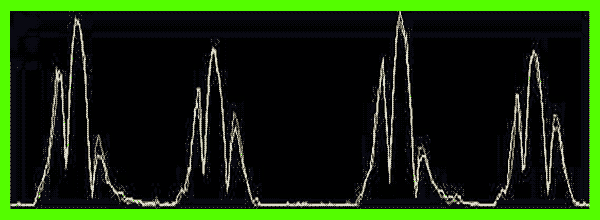
正常(軽微な異音)部品の比較
測定結論
センサーからのフィードバック情報を基に、システム信号の比較によってロボットアームの電流状態が動作品質に影響を与えることが確認できます。 モーターの電流が安定することで、より正確な動作制御が可能となります。 これにより、ロボットアームが異なる作業条件下でも安定して稼働でき、エネルギー消費とモーターの摩耗を最小限に抑えることができます。
VMS-ML 機械学習スマート監視システム
VMS-ML
不良品をリアルタイムで検出・防止