
実績

応用分野

質問集
フォトレジスト塗布装置のアーム動作をどのように監視し、設備の安定性を確保するか?
実績|フォトレジスト塗布装置のアーム動作をどのように監視し、設備の安定性を確保するか?フォトレジスト塗布装置専用のウェハー搬送ロボットアームは、高精度かつ安定した動作が求められ、機械振動によるウェハー表面への影響を最小限に抑える必要があります。どのようにアームの安定性を確保するのでしょうか?
フォトレジスト塗布装置のアーム
フォトレジスト塗布装置専用のウェハー搬送ロボットアーム
フォトレジスト塗布プロセスにおいて、ウェハーの品質に影響を及ぼす要因は多数あります。例えば、アームの精度、安定性、動作速度、機械振動などが密接に関係しています。
ロボットアームは、高精度かつ安定した動作を維持する必要があり、フォトレジストがウェハー表面全体に均一に塗布されるようにしなければなりません。アームの不安定さや精度不足は、フォトレジストの厚みのムラを引き起こし、その後のプロセスの品質に影響を与える可能性があります。
また、アームの振動がウェハーに伝わると、フォトレジストの均一性が損なわれる可能性があります。したがって、ウェハー表面への振動の影響を最小限に抑えることが重要です。

監視方法
VMS-ML 機械学習インテリジェント監視システム
VMS-ML 機械学習インテリジェント監視システムを活用し、アームによるウェハーのピックアップ、移動プロセスのX軸、Y軸、Z軸、θ軸の動作に伴う振動を分析します。
良好な状態での動作パターンを学習し、繰り返しの動作信号を識別して基準と照合します。Z軸、Y軸、θ軸、X軸の動作が安定しているかを詳細に評価し、異常な動作が検出された場合には事前に対策を講じることで、ロボットアームの品質検査と予知保全を実現します。
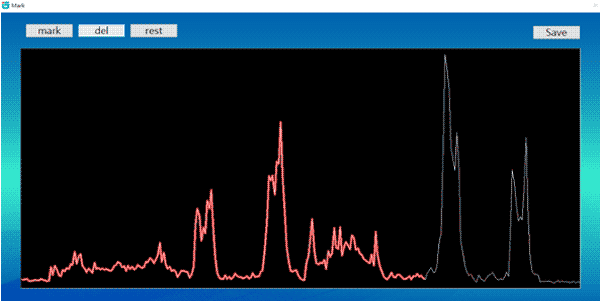
測定状況
動作:Robot transfer from main arm to cassette
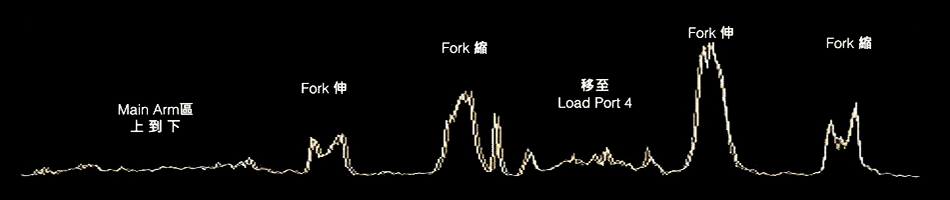
検出目的:1. Z軸の移動品質監視。2. X軸 (ウェハーの取扱い) の移動品質監視。
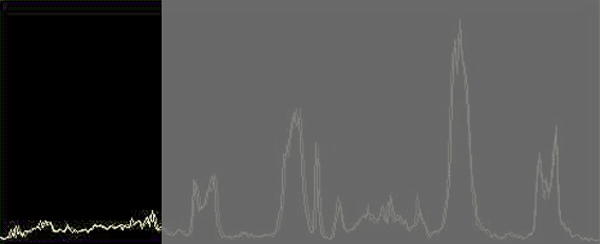
マーク1:Z軸のみの判別
マーク2:X軸のみの判別(スロット1への挿入)
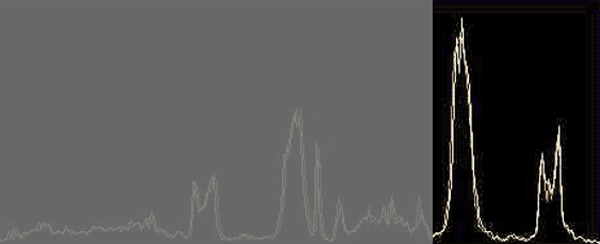
検出目的:1. Y軸(動作にはθ軸を含む)の移動品質監視。2. X軸 (ウェハーの取扱い) の移動品質監視。
マーク1:Y軸とθ軸のみの判別
マーク2:X軸のみの判別
測定結論
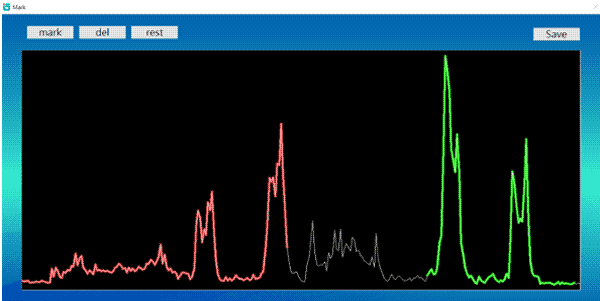
VMS-ML 機械学習インテリジェント監視システムを活用し、適切な動作パターンを学習して基準とし、各動作を監視および診断します。
システムを通じてロボットアームのどの動作で異常や不安定な状態が発生しているかを把握し、早期の予知保全を実施することで、予期せぬ異常の発生を防止します。
VMS-ML を活用したロボットアームの健康状態監視による利点:
・アームの異常によるウェハーの損傷・廃棄を防止
・ウェハー搬送プロセスを監視し、異常なスクラッチや衝突を警報
